Occupancy Grid Mapping
Using ROS and Matlab a Computer Vision Occupancy Map
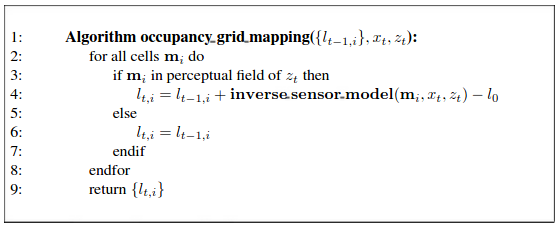
For this project, a roomba-like robot equipped with a laser range finder was used to collect data of the room. For every data point, the robot recorded an angle, a coordinate, and a distance to a measured object. This information was gathered with ROS and exported to a .txt file with all of the data. The occupancy grid was created using a bayes filter and a standard occupancy grid algorithm:

In the occupancy map, every cell (pixel) is binary: it is either empty or occupied. The probability that the cell is occupied is found using a log-odds representation. My code outputs a represenatation of the map half-way through the data, a representation before log-odd conversions, and a final occupancy grid.
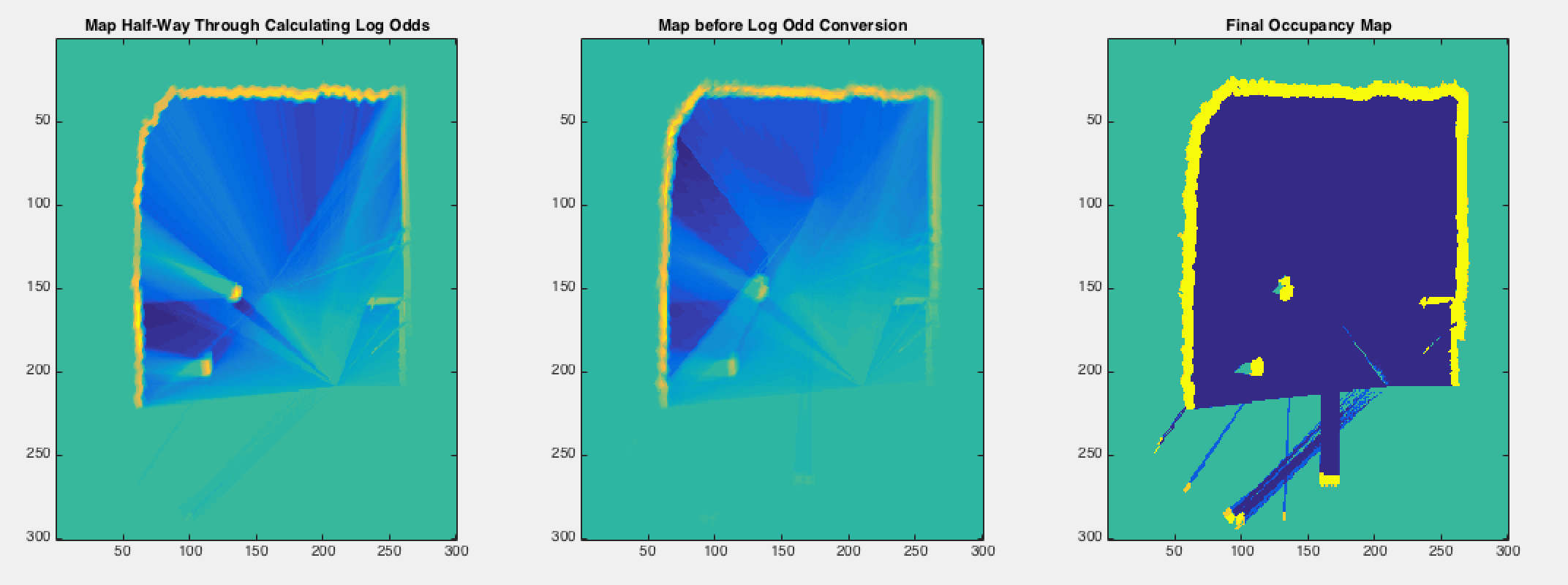
The actual picture of the environment is seen below

The full source code, including sample data on which to run the matlab script, can be found on my github page.
- Date: March 2015